Environment-Adaptive ORB-SLAM3
Brightness-Adaptive Feature Extraction for Improved Visual SLAM Robustness
Tech: C++ · ORB-SLAM3 · OpenCV · Linux · Visual SLAM · Computer Vision · Robotics
Overview
This project extends the ORB-SLAM3 visual SLAM framework by introducing a brightness-adaptive feature extraction strategy. Standard ORB-SLAM3 uses a fixed number of ORB features per frame, which can be inefficient in bright, high-texture environments and insufficient in darker or visually challenging scenes.
The proposed method dynamically adjusts the target number of ORB features based on the mean brightness of each incoming frame. Feature counts are scaled between 85% and 115% of the baseline value, increasing feature density in darker scenes and reducing unnecessary computation in brighter ones. The system was evaluated on the EuRoC Machine Hall and Vicon Room datasets, demonstrating mixed accuracy results but negligible computational overhead.
My Engineering Contribution
- Implemented brightness-adaptive feature scaling by computing mean frame intensity, normalizing to 0–1, and mapping to a 0.85–1.15 multiplier (adaptive
nFeatures). - Integrated the adaptive module directly into the ORB-SLAM3 tracking pipeline with minimal changes to downstream threads (mapping / loop closing).
- Evaluated baseline vs. adaptive performance on EuRoC Machine Hall (MH01/MH04/MH05) and Vicon Room (V101/V103) using ATE (evo toolchain).
- Measured runtime, CPU utilization, and RAM usage via
/usr/bin/time -vto confirm negligible overhead.
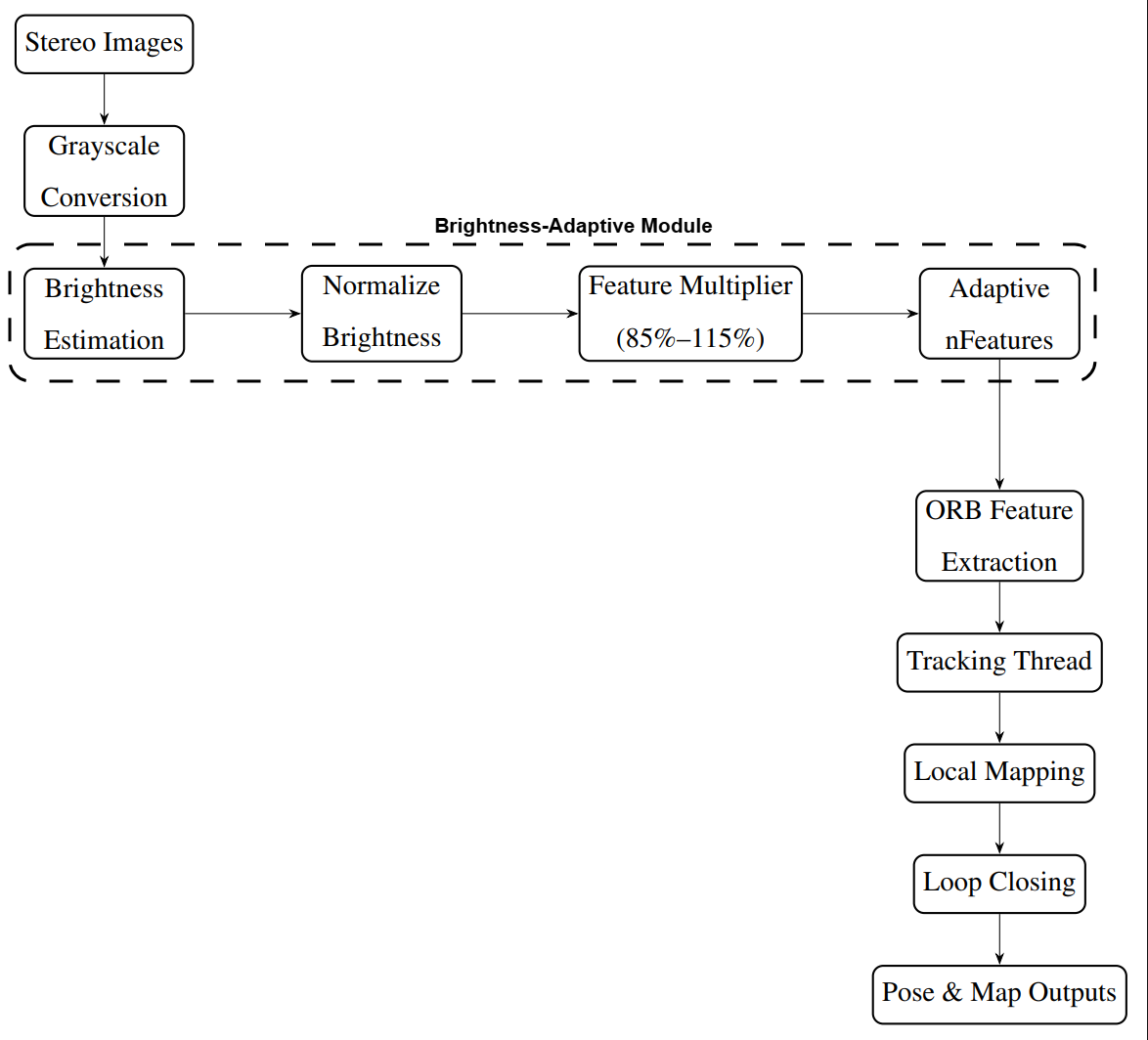
System Architecture
The adaptive module is inserted directly before ORB feature extraction, allowing the rest of the SLAM pipeline (tracking, local mapping, loop closing) to remain unchanged.
Key Results
- Adaptive range: Feature count scaled to 85%–115% of baseline via brightness-based multiplier.
- Accuracy: Modest improvement on MH04 difficult; comparable on most easy sequences; worse on V103 difficult (brightness-only heuristic limitation).
- Performance: Runtime differences were minimal (typically <1%), with small CPU/RAM variations.
Visuals (from evaluation)
These figures are included in the report, but shown here for quick review.
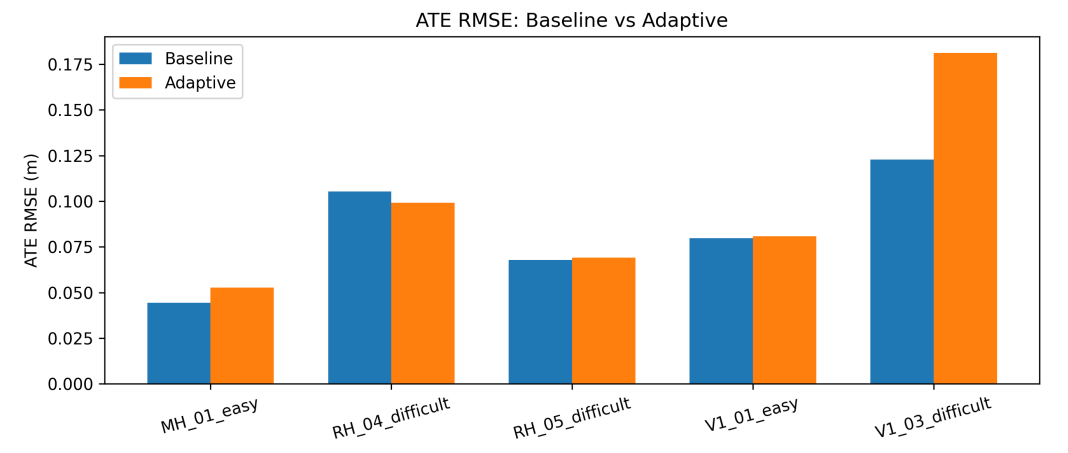
ATE RMSE comparison (baseline vs. adaptive) across EuRoC + Vicon sequences.
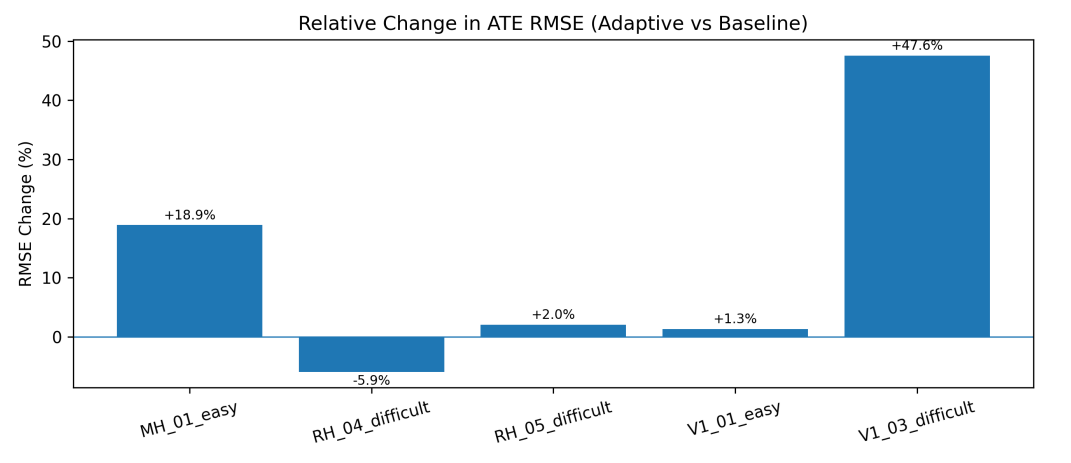
Relative change in RMSE (adaptive vs. baseline). Highlights where adaptation helps vs. hurts.
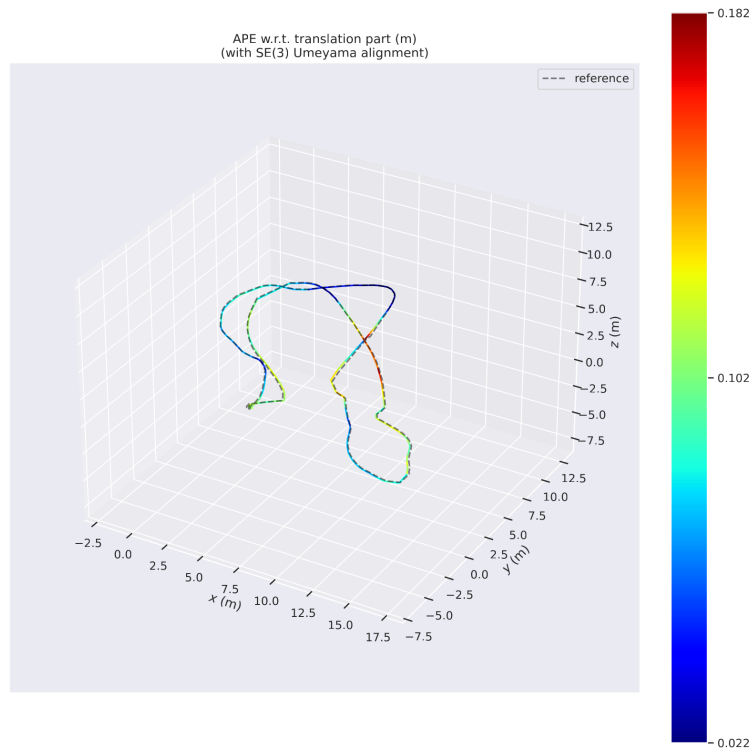
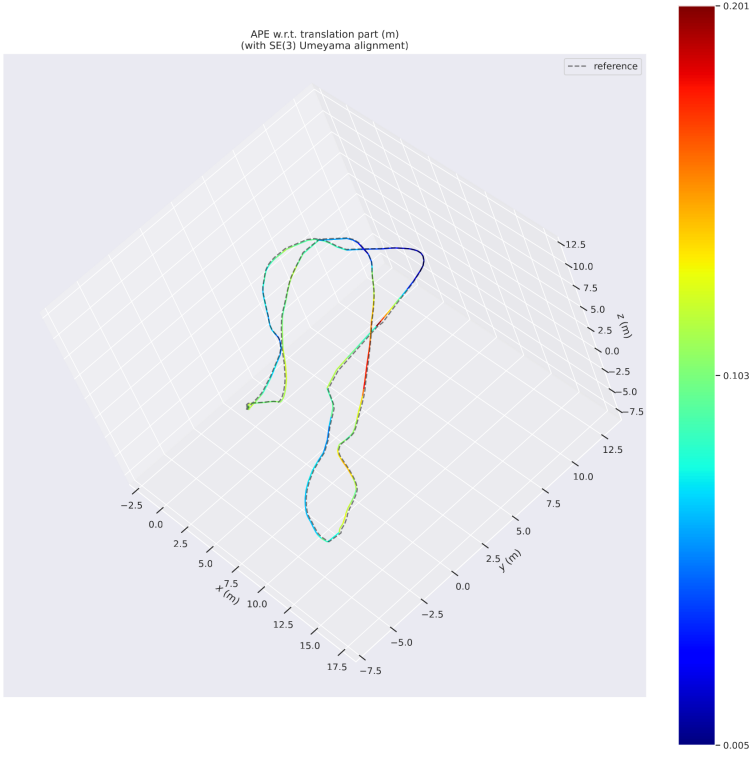
Trajectory comparison on MH04 difficult
Source Code
If you’d like to see the implementation details, here are the links:
Final Report
The full technical report details the system design, implementation, experimental evaluation, and analysis of results for the environment-adaptive ORB-SLAM3 system.